About me
I’m Matvei, a robotics software engineer with an MSc in Autonomous Systems (Aalto / EIT Digital) and production experience in autonomous vehicle fleet software. My background spans real-time C++ systems, path planning, Visual SLAM with semantic segmentation, and embedded AI inference on Jetson hardware.
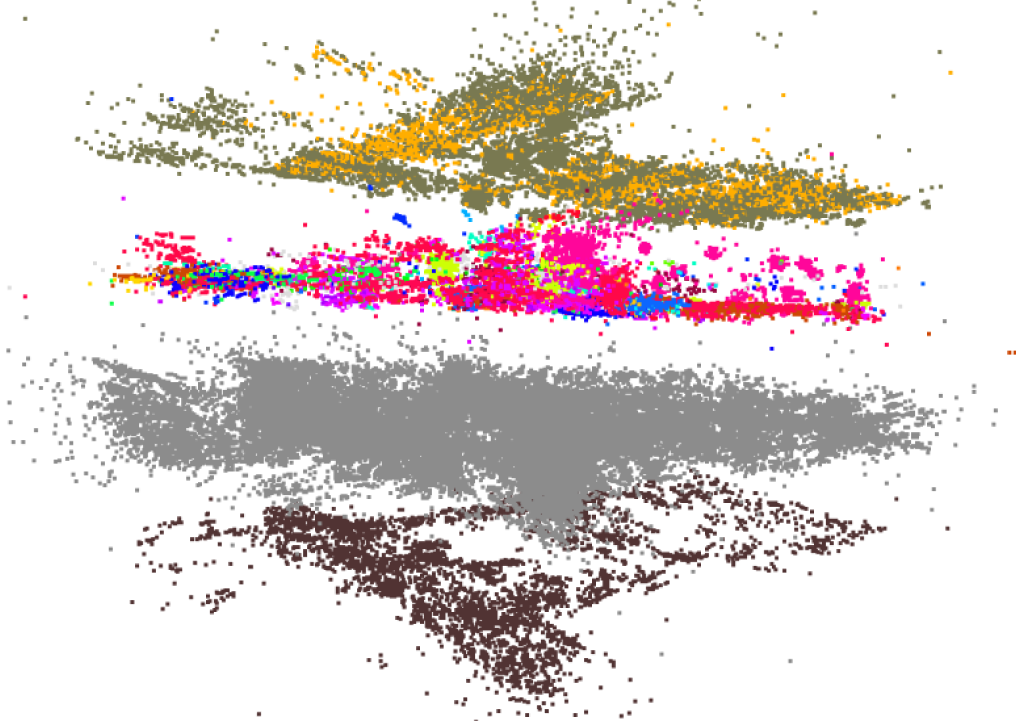
I’m particularly drawn to perception and working with real-world sensor data — where noisy inputs, tight latency budgets, and the unpredictability of physical environments make the engineering genuinely interesting.
What I do
-

Software development
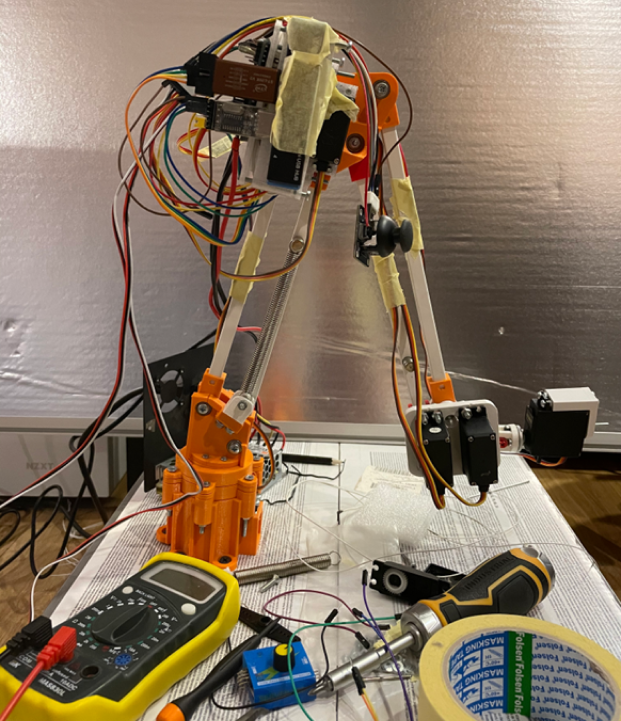
Development of software for autonomous systems and robotics using tools like ROS, C++, Python and Docker.
-

Research
Researching, prototyping and implementing SOTA algorithms in perception.